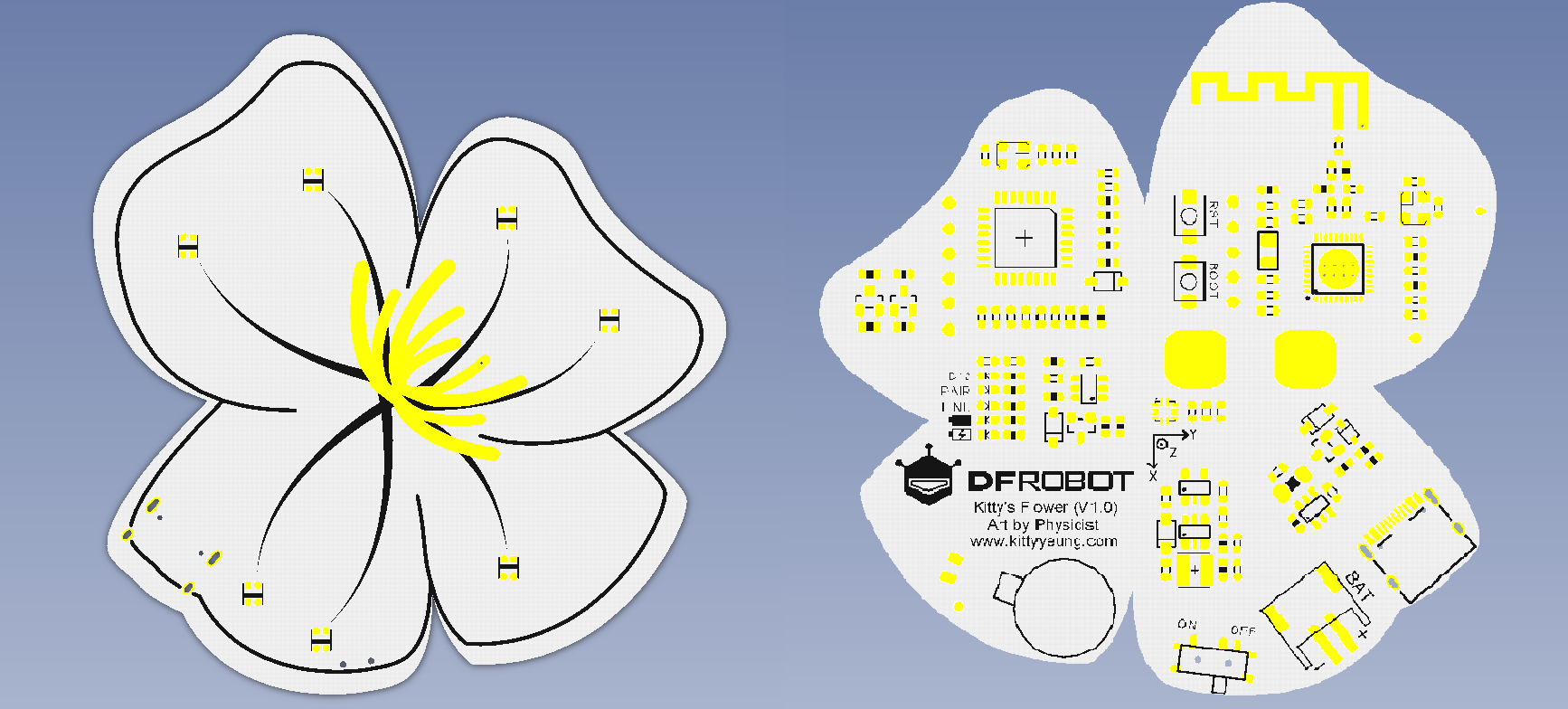
Premessa: Kitty’s Flower è una coppia di spille indossabili Bluetooth.Create congiuntamente da Art by Physicist e DFRobot, sono appositamente progettate per scenari applicativi indossabili, sistema integrato di gestione dell’alimentazione, luci LED RGB, accelerometro, sensori, vibrazioni e touch.Supporta Arduino e Scratch programmazione e può essere utilizzata come unità di controllo intelligente di base per prodotti indossabili, installazioni di arte interattiva e nuovi accessori.Due sono abbinati in coppia e vari effetti possono essere programmati dagli utenti.Le funzioni impostate in fabbrica sono programmate per quanto sopra scenario menzionato.Le spille da compagnia si abbinano all’abito Flower (top, pantaloncini e coprimaschera) con pittura digitale a mano su tessuto e fiori stampati in 3D su tulle.

CARATTERISTICHE TECNICHE:
- Microcontrollore: ATmega328
- Tipo di chip BLE: TI CC2540
- Supporta Bluetooth HID
- Debug del modulo Bluetooth tramite il comando AT
- Comunicazione della porta seriale
- Aggiornamento firmware USB BLELE
- Interfaccia di alimentazione: batteria al litio USB/3.7V, connettore JST
- Gamma di alimentazione esterna: 7-12V
- Bootloader: Arduino UNO
- Dimensioni: 70mm*70mm
- Peso: 30 g
LISTA MATERIALI:
-
Prodotto in vendita
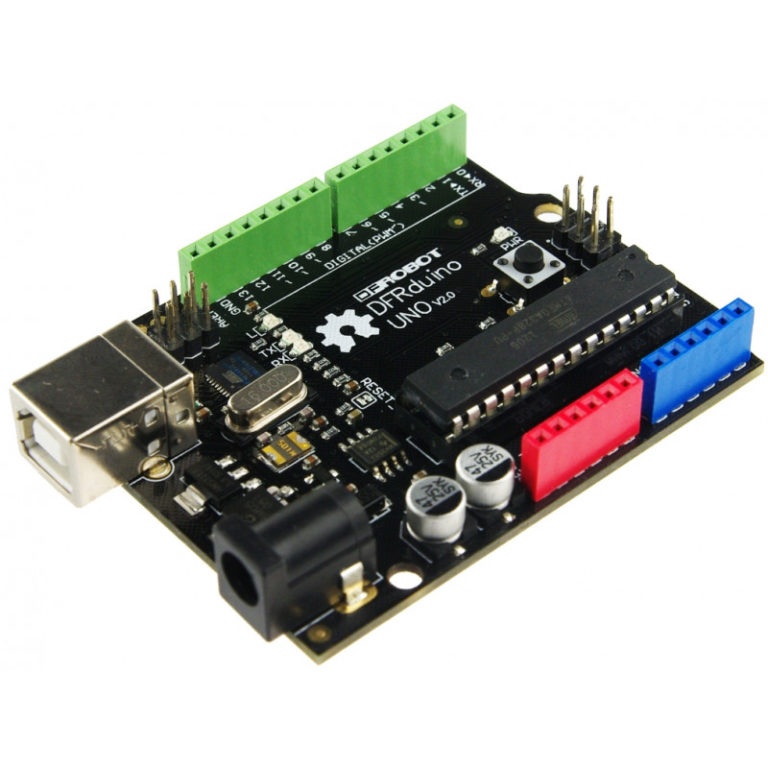 DFRduino UNO V2.1€0.00
DFRduino UNO V2.1€0.00 -
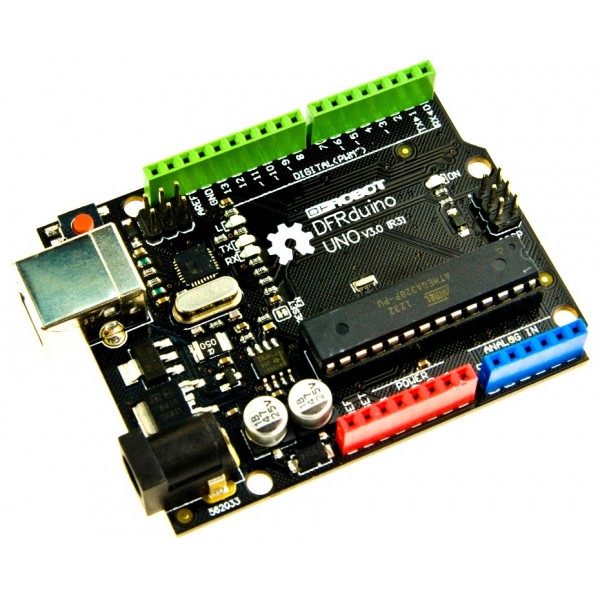 DFRduino UNO R3€18.50
DFRduino UNO R3€18.50
PANORAMICA DELLA SCHEDA:
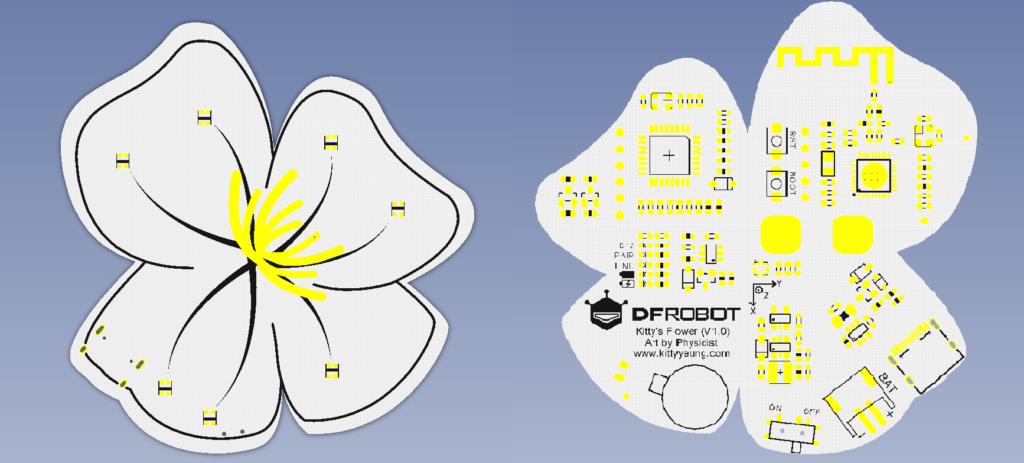
1 Motore a vibrazione D5
2 Tocco D6
3 LED RGB D9
4 Accelerometro a 3 assi LIS2DH I2C
Kitty Flower integra più funzioni, le mostreremo una per una di seguito, ma nell’uso effettivo, aggiorna Kitty Flowers Demo separatamente: KittyMother e KittyChild due demo per completare l’accoppiamento e la connessione.Le due demo imposteranno automaticamente lo stato master/slave delle schede madri, quindi leggere il valore dell’intensità del campo RSSI Bluetooth per determinare la distanza tra loro.
CODICE DI ESEMPIO PER MOTORE A VIBRAZIONE:
#define VMPIN 5 //Vibration motor pin
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(VMPIN, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(VMPIN, HIGH); // turn the Motor on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(VMPIN, LOW); // turn the Motor off by making the voltage LOW
delay(1000); // wait for a second
}CODICE DI ESEMPIO PER TOUCH:
#define TOUCHPIN 6
void setup() {
// initialize serial communication at 9600 bits per second:
Serial.begin(115200);
// make the pushbutton's pin an input:
pinMode(TOUCHPIN, INPUT);
}
// the loop routine runs over and over again forever:
void loop() {
// read the input pin:
int touchState = digitalRead(TOUCHPIN);
// print out the state of the button:
Serial.println(touchState);
delay(10); // delay in between reads for stability
}Apri la porta seriale, tocca lo stame, la porta seriale emetterà un livello alto; altrimenti, emetterà un livello basso
CODICE DI ESEMPIO PER LED RGB:
librerie:
Adafruit_NeoPixel LGPL-3.0: github.com/adafruit/Adafruit_NeoPixel
#include <Adafruit_NeoPixel.h>
#define PIN 9 //The signal pin connected with Arduino
#define LED_COUNT 60 // the amount of the leds of your strip
// Create an instance of the Adafruit_NeoPixel class called "leds".
// That'll be what we refer to from here on...
Adafruit_NeoPixel leds = Adafruit_NeoPixel(LED_COUNT, PIN, NEO_GRB + NEO_KHZ800);
void setup()
{
leds.begin(); // Call this to start up the LED strip.
clearLEDs(); // This function, defined below, turns all LEDs off...
leds.show(); // ...but the LEDs don't actually update until you call this.
}
void loop()
{
for (int i=0; i<LED_COUNT; i++)
{
rainbow(i);
delay(10); // Delay between rainbow slides
}
}
// Sets all LEDs to off, but DOES NOT update the display;
// call leds.show() to actually turn them off after this.
void clearLEDs()
{
for (int i=0; i<LED_COUNT; i++)
{
leds.setPixelColor(i, 0);
}
}
// Prints a rainbow on the ENTIRE LED strip.
// The rainbow begins at a specified position.
// ROY G BIV!
void rainbow(byte startPosition)
{
// Need to scale our rainbow. We want a variety of colors, even if there
// are just 10 or so pixels.
int rainbowScale = 192 / LED_COUNT;
// Next we setup each pixel with the right color
for (int i=0; i<LED_COUNT; i++)
{
// There are 192 total colors we can get out of the rainbowOrder function.
// It'll return a color between red->orange->green->...->violet for 0-191.
leds.setPixelColor(i, rainbowOrder((rainbowScale * (i + startPosition)) % 192));
}
// Finally, actually turn the LEDs on:
leds.show();
}
// Input a value 0 to 191 to get a color value.
// The colors are a transition red->yellow->green->aqua->blue->fuchsia->red...
// Adapted from Wheel function in the Adafruit_NeoPixel library example sketch
uint32_t rainbowOrder(byte position)
{
// 6 total zones of color change:
if (position < 31) // Red -> Yellow (Red = FF, blue = 0, green goes 00-FF)
{
return leds.Color(0xFF, position * 8, 0);
}
else if (position < 63) // Yellow -> Green (Green = FF, blue = 0, red goes FF->00)
{
position -= 31;
return leds.Color(0xFF - position * 8, 0xFF, 0);
}
else if (position < 95) // Green->Aqua (Green = FF, red = 0, blue goes 00->FF)
{
position -= 63;
return leds.Color(0, 0xFF, position * 8);
}
else if (position < 127) // Aqua->Blue (Blue = FF, red = 0, green goes FF->00)
{
position -= 95;
return leds.Color(0, 0xFF - position * 8, 0xFF);
}
else if (position < 159) // Blue->Fuchsia (Blue = FF, green = 0, red goes 00->FF)
{
position -= 127;
return leds.Color(position * 8, 0, 0xFF);
}
else //160 <position< 191 Fuchsia->Red (Red = FF, green = 0, blue goes FF->00)
{
position -= 159;
return leds.Color(0xFF, 0x00, 0xFF - position * 8);
}
}CODICE DI ESEMPIO PER ACCELLEROMETRO:
librerie:
- Wire LGPL: arduino.cc/en/Reference/Wire
- DFRobot_LIS2DH12 LGPL: github.com/DFRobot/DFRobot_LIS2DH12
#include <Wire.h>
#include <DFRobot_LIS2DH12.h>
DFRobot_LIS2DH12 LIS; //Accelerometer
void setup() {
Wire.begin();
Serial.begin(115200);
while (!Serial);
delay(100);
// Set measurement range
// Ga: LIS2DH12_RANGE_2GA
// Ga: LIS2DH12_RANGE_4GA
// Ga: LIS2DH12_RANGE_8GA
// Ga: LIS2DH12_RANGE_16GA
while (LIS.init(LIS2DH12_RANGE_16GA) == -1) { //Equipment connection exception or I2C address error
Serial.println("No I2C devices found");
delay(1000);
}
}
void loop() {
acceleration();
}
/*!
@brief Print the position result.
*/
void acceleration(void)
{
int16_t x, y, z;
delay(100);
LIS.readXYZ(x, y, z);
LIS.mgScale(x, y, z);
Serial.print("Acceleration x: "); //print acceleration
Serial.print(x);
Serial.print(" mg \ty: ");
Serial.print(y);
Serial.print(" mg \tz: ");
Serial.print(z);
Serial.println(" mg");
}
Buon progetto.
