Premessa: Il sensore di angolo di Hall è un sensore in miniatura a 360 gradi che funziona in base al principio dell’effetto Hall. È compatibile con l’interfaccia del sensore di gravità DFRobot e funziona con un’alimentazione a 5 V CC. Anche l’uscita analogica è 0 ~ 5 V quindi può funzionare direttamente con Arduino.
Il sensore dell’angolo di Hall funziona convertendo le informazioni sull’angolo in un segnale elettrico.Quando l’angolo di rotazione dell’oggetto viene passato ai sensori dell’asse di rotazione, emette un segnale elettrico proporzionale all’angolo di rotazione.
Il guscio del sensore angolare è realizzato in robusta lega di alluminio, utilizzando la tecnologia senza contatto di tipo Hall, e include cuscinetti in acciaio inossidabile importato ad alta velocità di alta qualità e altri componenti per ridurre la resistenza all’attrito durante le letture.
L’unità offre una lunga durata ed è compatta, con un’alta risoluzione, rotazione regolare e rumore dinamico.Questa unità garantisce prestazioni in vari ambienti industriali difficili ed è protetta da interferenze elettromagnetiche, acqua, olio, vibrazioni e urti.Un’applicazione tipica è il rilevamento dell’angolo di pedivella e la misurazione dell’angolo di sterzata.
CARRATTERISTICHE TECNICHE:
- Angolo meccanico: 0-360° (nessun arresto)
- Tensione di esercizio: 5V ± 10%
- Corrente operativa: <13,5 mA Segnale di uscita: 0-5 V CC (rapporto) Risoluzione: 0,088° (ADC a 12 bit) Precisione: ± 0,3% FS Dimensione dell’albero di uscita: 6 mm (D Sharp) Coppia di rotazione: <5mN·m Frequenza di aggiornamento: 0,6 ms / 0,2 ms (alta velocità) Temperatura di esercizio: -30 ℃ ~ 80 ℃ Carico assiale ammissibile: Orizzontale <5N;Verticale <10N Classe di protezione: IP40 Vita meccanica:> 50 milioni di giri
- Peso: 36 g
LISTA MATERIALI:

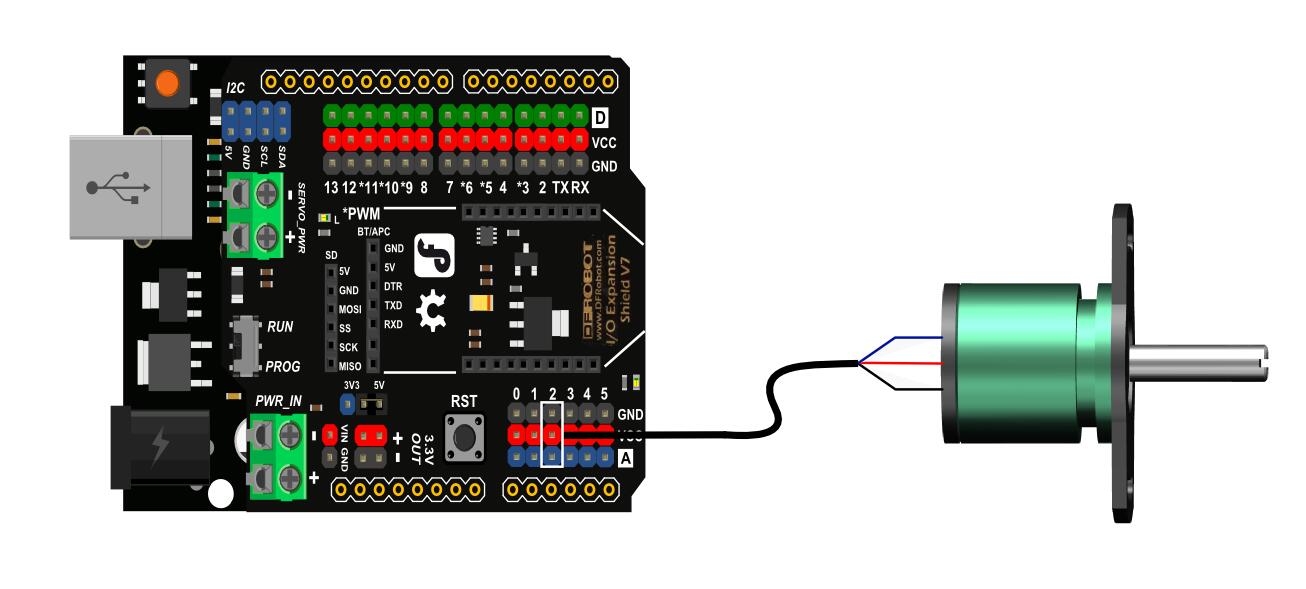
1 Segnale Segnale analogico
2 VCC Potenza +
3 GND Potenza-
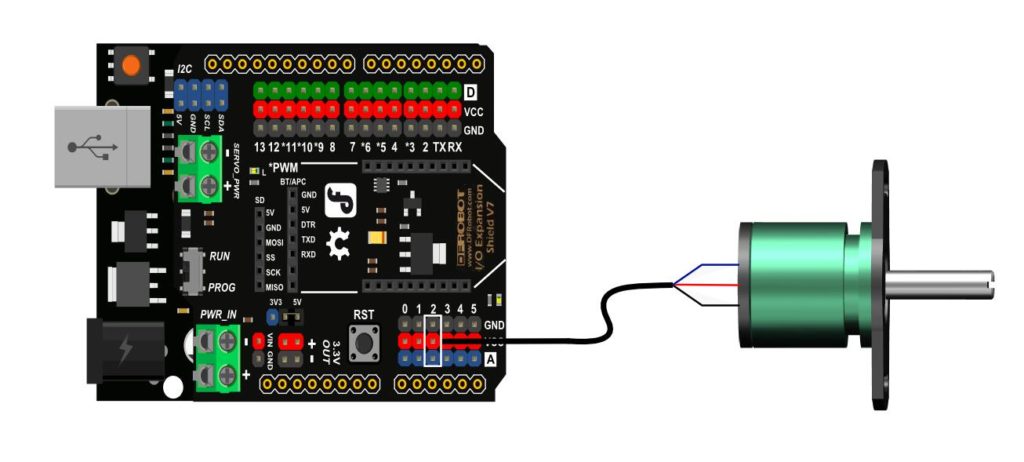
SCHEMA DI COLLEGAMENTO:
CODICE DI ESEMPIO:
void setup()
{
Serial.begin(115200);
}
void loop()
{
float analogValue = analogRead(A2); //Voltage reading
float amp = analogValue/1024.0 * 360; //Angle calculation ( UNO is a 10-bit AD )
Serial.print("Angle:");
Serial.println(amp);
delay(500);
}
Buon progetto.
