Premessa: Questo è un driver motore DC ultra piccolo per progetti su piccola scala che utilizza il popolare IC-LM2575. Ciò fornisce un modo potente per pilotare motori 36V a 15 A. UVLO (Under Voltage Latch-Out) offre una protezione sicura per il tuo sistema. Inoltre, la scheda include la protezione ESD (scarica elettrostatica). Compatibile Arduino e Raspberry Pi con livelli di segnale compresi tra 0.8V e 5V.

CARATTERISTICHE TECNICHE
- Voltage supply: DC 12 ~ 36 V
- Voltage supply limit: 6.5 ~ 40 V
- Control signal Level (Compatible 3.3V/5V)
- High: DC 2.0 ~ 5.5 V
- Low: DC0 ~ 0.8 V
- Maximum continuous operating current:
- 12A (no heat sink)
- 15A (with simple heat sink)
- 20A (with Thick Heat Sink/ Cooling System)
- Peak current: 110 A
- Speed control: PWM
- Minimum valid Pulse Width: 200 ns
- Maximum Output Current @5V: 500 mA
- Working Temperature: -25 ~ 85 °C
- Mounting Hole: M3
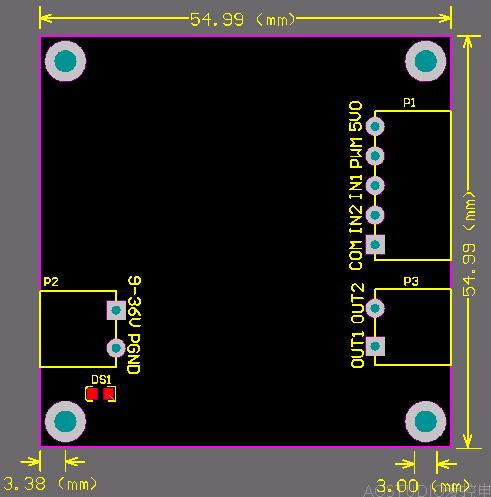
- Dimension (Length * Width * Height): 55 x 55 x 20(mm)/2.165 x 2.165 x 0.787 (in)
- Weight: 42g
LISTA MATERIALI




PANORAMICA DELLA SCHEDA
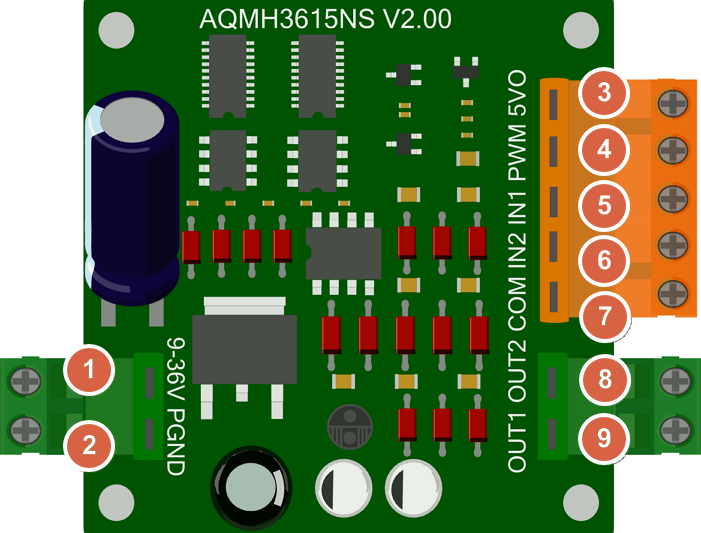
- 1 9 – 36V Power Supply,
- 2 PGND Power Supply, GND/ –
- 3 5VO 5V Output, you can use this power to feed Arduino through Arduino’s 5V port, NOT Vin which requires 7-12V input
- 4 PWM Speed control signal input
- 5 IN1 Motor steering control signal input 1, Note1
- 6 IN2 Motor steering control signal input 2
- 7 COM GND
- 8 OUT2 Motor_
- 9 OUT1 Motor_-
CONTROLLO SCHEDA
IN1 IN2 PWM OUT1, OUT2 Motor Behavior
0 0 x Stop
1 1 x Vacant
1 0 1 Forward 100%
0 1 1 Reverse 100%
1 0 PWM Forward at PWM speed
0 1 PWM Reverse at PWM speed
“0”: TTL_Low
“1”: TTL_High
“PWM”: PWM speed setting
“x”: Any TTL, and it is default TTL_Low while no PWM signal.
Nota: IN1 e IN2 proteggere il vostro motore prima di passare alla direzione dello sterzo motore, assicurarsi in primo luogo di impostare freno motore IN1 – 0 & IN2 – 0 , soprattutto quando il PWM è stato impostato come 100%, tutta velocità. Il suggerimento è frenare con tempo > 0.1S, a seconda del motore.
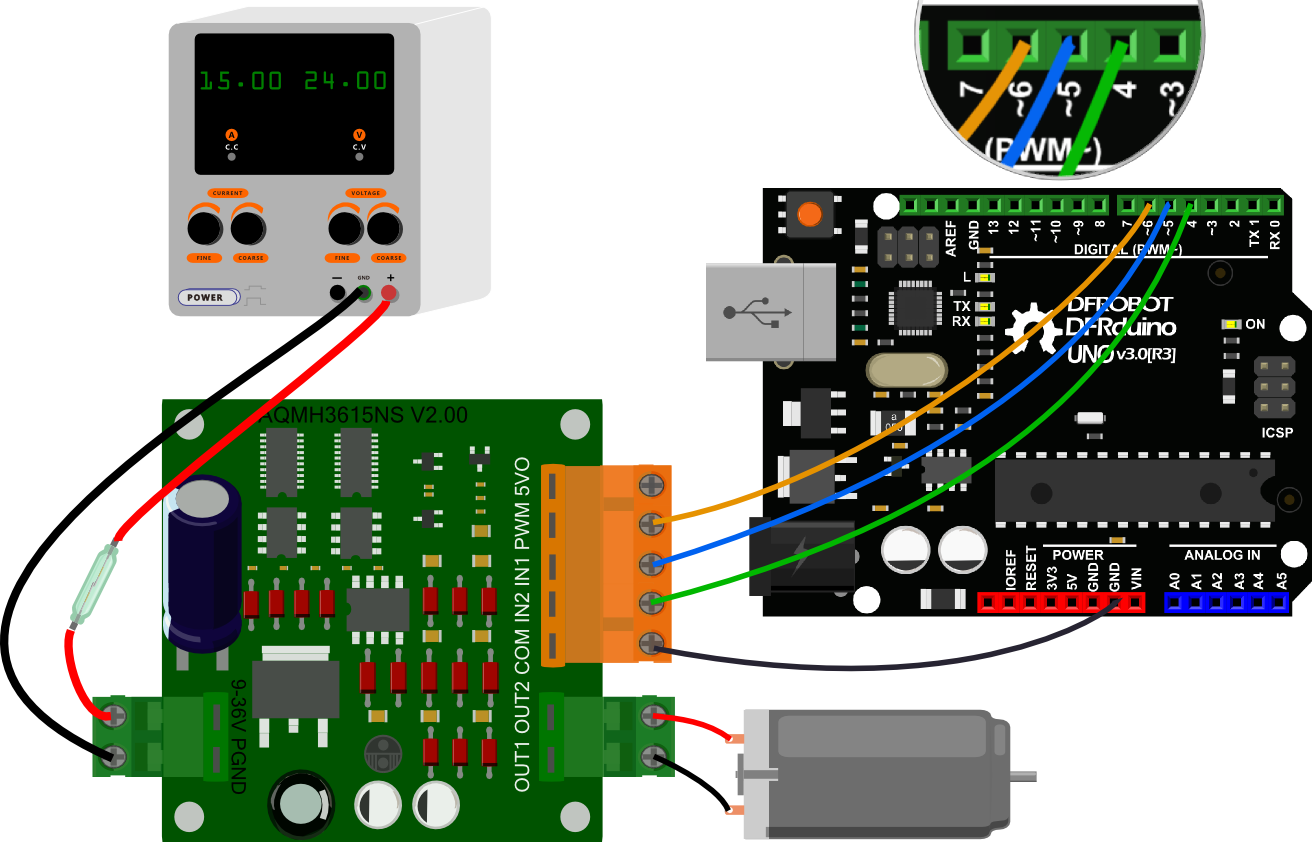
SCHEMA DI COLLEGAMENTO
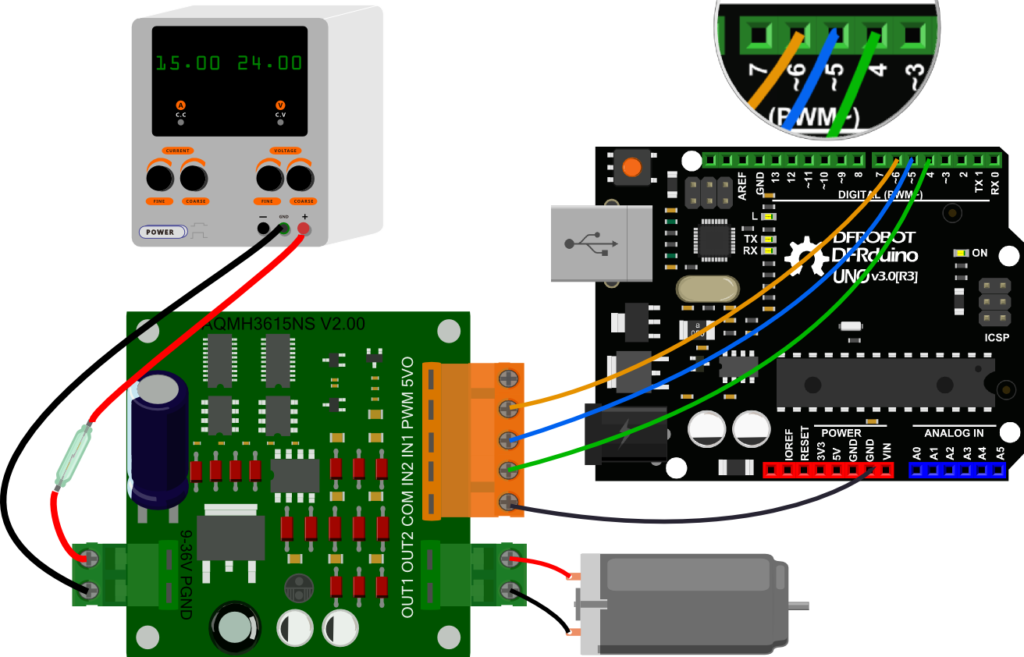
Questo tutorial illustrerà come usare PWM per controllare un motore usando il modulo.
Sicurezza dell’impianto e sicurezza personale: aggiungere un fusibile a 20A tra la fonte di alimentazione e il modulo (9-36 V). La porta 5VO è per l’uscita 5V per altro modulo, NON può essere utilizzata come Power_In.
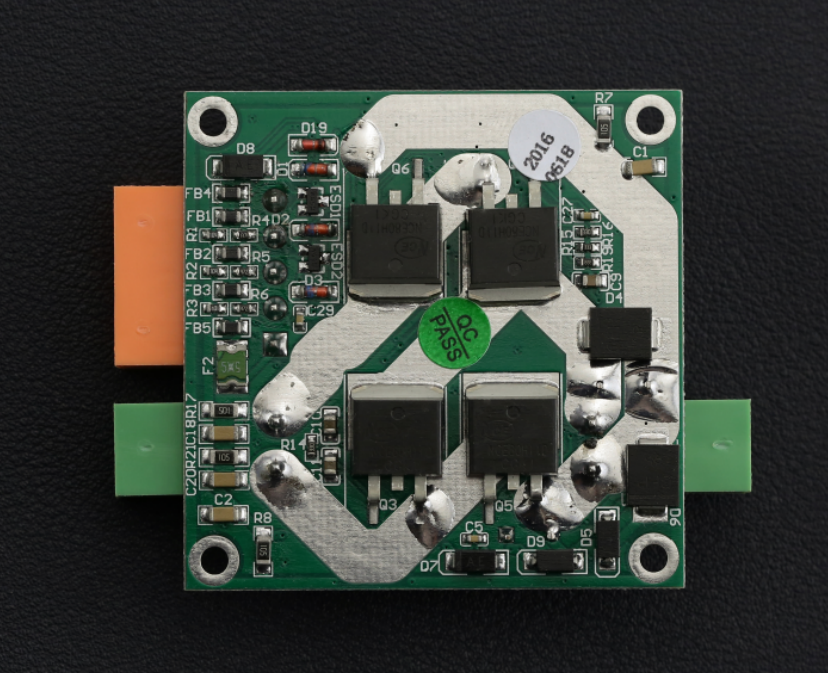
Suggerimenti per l’installazione: Il modulo necessita di un sistema di raffreddamento (dissipatore di calore o ventola) una volta che il motore funziona a più di 15 A. Come mostra l’immagine sopra riportata, lo strato conduttivo posteriore del driver può essere molto largo, quindi dovresti prendere alcune misure per assicurarsi che non cortocircuiti.
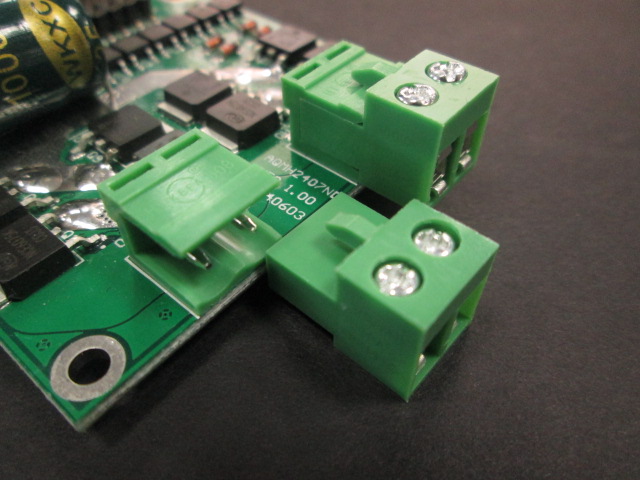
Importante: connettore innestabile è possibile che il connettore sia progettato come tipo innestabile per adattarsi ai cavi maschio o femmina.
CODICE DI ESEMPIO
const int IN1=5;
const int IN2=4;
const int PWM=6;
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(PWM, OUTPUT);
}
void loop() {
Motor_Brake();
delay(100);
Motor_Forward(200);//Forward, PWM setting 0-255
delay(3000);
Motor_Brake();
delay(100);
Motor_Backward(200);//Reverse, PWM setting 0-255
delay(3000);
}
void Motor_Forward(int Speed) {
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
analogWrite(PWM,Speed);
}
void Motor_Backward(int Speed) {
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
analogWrite(PWM,Speed);
}
void Motor_Brake(){
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
}Buon Progetto.
